Publications
2025
- RCIM
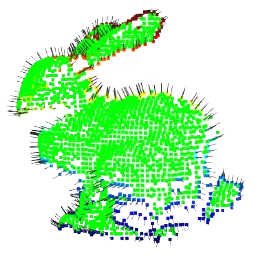
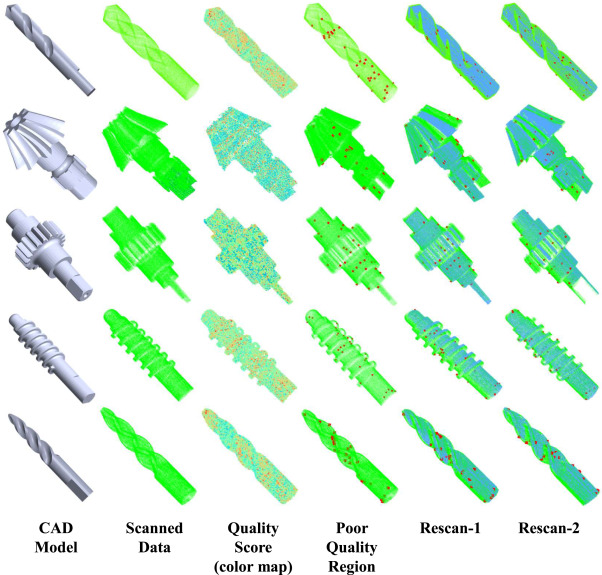 A robust assessment method of point cloud quality for enhancing 3D robotic scanningRobotics and Computer-Integrated Manufacturing, 2025
A robust assessment method of point cloud quality for enhancing 3D robotic scanningRobotics and Computer-Integrated Manufacturing, 2025

2024
- arXiv
- JIRS
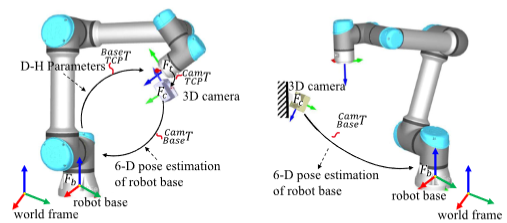 Automatic robot hand-eye calibration enabled by learning-based 3D visionJournal of Intelligent & Robotic Systems, 2024
Automatic robot hand-eye calibration enabled by learning-based 3D visionJournal of Intelligent & Robotic Systems, 2024


2023
- MMT
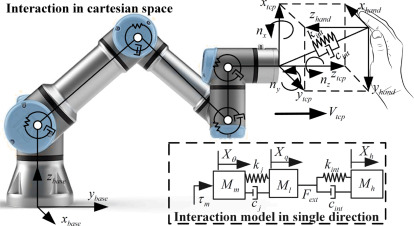 Collaborative robot dynamics with physical human–robot interaction and parameter identification with PINNMechanism and Machine Theory, 2023
Collaborative robot dynamics with physical human–robot interaction and parameter identification with PINNMechanism and Machine Theory, 2023 - RA-L
 Physics-Informed Neural Network for Model Prediction and Dynamics Parameter Identification of Collaborative Robot JointsIEEE Robotics and Automation Letters, 2023
Physics-Informed Neural Network for Model Prediction and Dynamics Parameter Identification of Collaborative Robot JointsIEEE Robotics and Automation Letters, 2023


2022
- RCIM
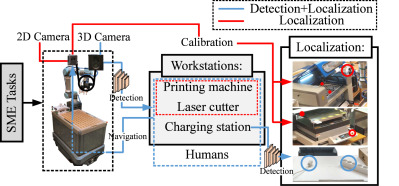 Learning-based object detection and localization for a mobile robot manipulator in SME productionRobotics and Computer-Integrated Manufacturing, 2022
Learning-based object detection and localization for a mobile robot manipulator in SME productionRobotics and Computer-Integrated Manufacturing, 2022

2021
- MPE
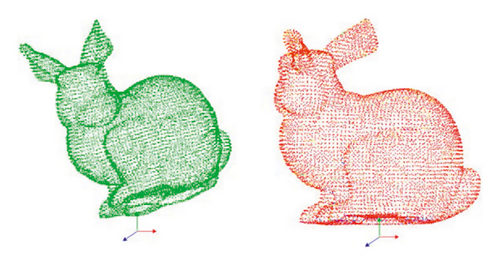 A tutorial review on point cloud registrations: principle, classification, comparison, and technology challengesMathematical Problems in Engineering, 2021
A tutorial review on point cloud registrations: principle, classification, comparison, and technology challengesMathematical Problems in Engineering, 2021 - ICRA
 Deep learning on 3d object detection for automatic plug-in charging using a mobile manipulatorIn 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021
Deep learning on 3d object detection for automatic plug-in charging using a mobile manipulatorIn 2021 IEEE International Conference on Robotics and Automation (ICRA), 2021

2020
- ICMA
 Experimental eye-in-hand calibration for industrial mobile manipulatorsIn 2020 IEEE International Conference on Mechatronics and Automation (ICMA), 2020
Experimental eye-in-hand calibration for industrial mobile manipulatorsIn 2020 IEEE International Conference on Mechatronics and Automation (ICMA), 2020
